






 Рейтинг: 4.5/5.0 (1655 проголосовавших)
Рейтинг: 4.5/5.0 (1655 проголосовавших)Категория: Инструкции

Загрузка.
STEP 7 – это базовый пакет программ, включающий в свой состав весь спектр инструментальных средств, необходимых для конфигурирования аппаратуры и промышленных сетей, настройки параметров, программирования, диагностики и обслуживания систем управления, построенных на основе программируемых контроллеров SIMATIC S7-300/S7-400/C7/WinAC. С помощью этой программы выполняется комплекс работ по созданию и обслуживанию систем автоматизации на основе программируемых логических контроллеров Simatic S7-300 и Simatic S7-400 фирмы Siemens. В первую очередь это работы по программированию контроллеров. Программируемый логический контроллер, ПЛК — это микропроцессорное устройство, предназначенное для управления технологическими процессами в промышленности. Принцип работы ПЛК заключается в обработке по прикладной программе пользователя данных с модулей входов (например, сигналов от подключенных датчиков) и последующей выдачей управляющих сигналов, посредством модулей выходов и модулей связи, обеспечивающих подключение исполнительных устройств. В основе работы лежит концепция проекта. под которым понимается комплексное решение задачи автоматизации, включая несколько взаимосвязанных контроллеров на базе физических микроконтроллеров, соединяющие их сети и системы человеко-машинного интерфейса. Работу с проектом в целом обеспечивает главная утилита Step 7 — Simatic Manager. Step 7 позволяет производить конфигурирование программируемых логических контроллеров и сетей (утилиты HWConfig и NetPro). В процессе конфигурирования определяется состав оборудования в целом, разбиение на модули, способы подключения, используемые сети, выбираются настройки для используемых модулей. Система проверяет правильность использования и подключения отдельных компонент. Завершается конфигурирование загрузкой выбранной конфигурации в оборудование, что по сущности является настройкой оборудования. Утилиты конфигурирования позволяют осуществлять диагностику оборудования, обнаруживать аппаратные ошибки или неправильный монтаж оборудования. Программирование контроллеров производится редактором программ, обеспечивающим написание программ на трех языках:
В дополнение к трем основным языкам могут быть добавлены четыре дополнительные языка, поставляемые отдельно:
Возможность наблюдения за текущим состоянием программы, доступное при использовании любого языка программирования, обеспечивает не только отладку программного обеспечения, но и поиск неисправностей в подключаемом оборудовании, даже если оно не имеет средств диагностики.
При необходимости STEP 7 может дополняться инструментальными средствами проектирования, значительно упрощающими разработку сложных проектов. Для подключения программируемых контроллеров компьютер должен быть оснащен MPI картой (CP5611 или CP 5512), PC/MPI или USB/MPI адаптером и соединительным кабелем. STEP 7 содержит полный спектр инструментальных средств, необходимых для выполнения всех этапов разработки проекта, а также последующей эксплуатации системы управления:
· SIMATIC Manager - ядро пакета STEP 7, позволяющий выполнять управление всеми составными частями проекта, осуществлять быстрый поиск необходимых компонентов, производить запуск необходимых инструментальных средств;
· Symbol Editor - программа задания символьных имен, типов данных, ввода комментариев для глобальных переменных. Символьные имена доступны во всех приложениях;
· Hardware Configuration - для программного конфигурирования аппаратуры системы автоматизации и настройки параметров всех модулей. Выполняется автоматическая проверка корректности всех вводимых данных;
· Communication - для задания управляемой по времени циклической передачи данных между компонентами автоматизации через MPI или для событийно управляемой передачи данных через MPI, PROFIBUS или Industrial Ethernet;
· System diagnosis - предоставляет пользователю обзор состояния контроллера;
· Information functions - для быстрого обзора данных CPU и поведения написанной пользователем программы;
Загрузка.
















Язык релейных схем (KOP/LAD). В программе на языке релейных схем (диаграмм “лестничной“ логики) базовые логические элементы представляются в виде контактов, катушек реле и блоков. Набор взаимосвязанных элементов, образующих законченную часть релейной схемы, называется сегментом. Входы, предназначенные для подключения внешних сигналов, представляются на релейной схеме в виде контактов. Нормально открытый контакт обеспечивает протекание тока при его замыкании, а нормально закрытый – при его отпускании. Выходы, предназначенные для подключения внешних устройств управления, представляются на релейной схеме в виде катушек. Когда по катушке протекает ток, соответствующий выход переходит во включенное состояние.
Использование блоков позволяет упростить процесс программирования. Например, в виде блоков представляются таймеры, счетчики, логические, математические элементы и другие устройства. На языке релейных схем все линии в сегменте должны быть соединены с допустимыми элементами. Все сегменты должны завершаться либо катушкой, либо блоком.
Язык списка операторов (AWL/STL). Программа на языке списка операторов (инструкций) содержит элементы, представляемые в виде набора команд для выполнения требуемых функций и, в отличие от языка релейных схем, отображается не в графическом, а в текстовом формате, по типу мнемокода.
После того как программа записана в CPU, она начинает выполняться с первой команды и после завершения выполнения всей программы она повторяется снова.
Контакты (входы), катушки (выходы) и логические элементы Таблица 2
Язык релейных схем (KOP/LAD)
Язык списка операторов (AWL/STL)
"ДА"- Опрос входа: Ток течет? Если да, то результат опроса “1”
"НЕ"- Опрос входа: Ток не течет? Если да (тока нет), то результат опроса “0”
"И"- Последовательная цепочка. Оба ключа должны быть замкнуты для протекания тока.
"ИЛИ"- Параллельная цепочка. Первый или второй ключ должен быть замкнут для протекания тока.
Катушка. Если ее значение “1” и ток проходит через катушку, то она активизируется.
Конец главной программы.
Команды в программе для контроллера представляют собой набор символов. Команда содержит операторную (-| |-) и операндную часть (I X.X).
Операторная часть команды или код операции определяет функцию, которая выполняется, когда реализуется сама команда (что делать?). Операндная часть команды содержит дополнительную информацию для команды (над чем делать?); она содержит идентификатор операнда, например вход (I) и параметр (X.X). Идентификатор операнда однозначно определяет область памяти PLC, куда помещаются, например, значения входов и выходов. Параметр является адресом операнда и содержит адрес байта и номер бита (Х.X). Адрес байта определяет первая цифра (от 0 до 7), а номер бита определяет вторая цифра (от 0 до 7). Все основные логические элементы для работы с битами сведены в табл. 2.
©2015 mykonspekts.ru Все права принадлежат авторам размещенных материалов.
Графический язык программирования Ladder Logic (LAD) основан на представлении коммутационных схем. Элементы коммутационной схемы, такие как нормально открытые контакты и нормально замкнутые контакты, группируются в сегменты. Один или несколько сегментов образуют раздел кодов логического блока.
Создание программ в нем выполняется в редакторе пошагового ввода.
Язык программирования. Функциональный план (FBD)
Язык программирования Функциональный план (FBD) использует для представления логики графические логические символы, известные из булевой алгебры. Сложные функции, такие как математические, также могут быть представлены непосредственно в соединении с логическими блоками.
Язык программирования. Список команд (STL)
Представление языка программирования Список команд (STL) – это текстовый язык, подобный машинному коду. Каждая команда соответствует шагу работы CPU при обработке программы. Несколько команд могут быть связаны друг с другом, образуя сегменты.
Язык программирования Список команд включен в стандартный пакет программного обеспечения STEP 7. Вы можете редактировать блоки S7 в этом представлении языка с помощью редакторов пошагового ввода или создавать свою программу с помощью редактора, работающего в режиме свободного редактирования в исходном файле на STL, а затем компилировать ее в блоки.
Язык программирования S7 SCL
Язык программирования SCL (Structured Control Language [Структурированный язык управления]), доступный как дополнительный пакет, ? это текстовый язык высокого уровня, определение которого в целом соответствует стандарту Международной электротехнической комиссии IEC 1131-3. Этот паскалеобразный язык благодаря своим командам высокого уровня упрощает в сравнении с STL программирование циклов и условных переходов. Поэтому SCL пригоден для расчетов, включая формулы, сложные оптимизационные алгоритмы или управление большими объемами данных.
Создание программ на S7 SCL производится в режиме свободного редактирования в исходном файле.
FOR INDEX:= 1 TO ENDVALUE DO
IF IQ1 >10000 THEN
Язык программирования S7 Graph (последовательное управление)Графический язык программирования S7 Graph. доступный в виде дополнительного пакета, дает возможность программирования устройств последовательного управления. Это включает в себя создание последовательности шагов, определение содержания каждого шага и определение переходов. Вы программируете содержание шагов на специальном языке программирования (похожем на список команд) и вводите переходы в редакторе цепных логических схем (модернизированная версия языка КОР).
S7 Graph очень ясно представляет сложные последовательности и делает программирование и поиск неисправностей более эффективными.
С помощью редактора S7 Graph программируется функциональный блок, который содержит генератор последовательности шагов. Соответствующий экземплярный блок данных содержит данные для этого генератора, например, параметры FB, условия для шагов и переходов. Вы можете обеспечить автоматическое создание этого экземплярного блока данных в редакторе S7 Graph.
Исходный файлИз функционального блока, созданного в S7 Graph, может быть сгенерирован текстовый исходный файл, который может интерпретироваться панелями оператора или текстовыми дисплеями интерфейса с оператором для отображения генератора последовательности шагов.
Язык программирования S7 HiGraph (граф состояний)Графический язык программирования S7 HiGraph. доступный в качестве дополнительного пакета, позволяет программировать ряд блоков в вашей программе как графы состояний. Это разделяет вашу установку на отдельные функциональные агрегаты, каждый из которых может принимать различные состояния. Для изменения состояний определяются переходы. Вы описываете действия, поставленные в соответствие состояниям, и условия для переходов между состояниями на языке, похожем на список команд.
Вы создаете граф для каждого функционального агрегата, который описывает поведение этого агрегата. Графы для установки объединяются в группы графов. Для синхронизации функциональных агрегатов между графами может производиться обмен сообщениями. Ясное представление переходов между состояниями функционального агрегата делает возможным систематическое программирование и облегчает поиск ошибок. В отличие от S7 Graph, в S7 HiGraph в каждый момент времени активно только одно состояние (в S7 Graph: «шаг»). На следующем рисунке показано, как создавать графы для функциональных агрегатов (пример).

Группа графов хранится в исходном файле HiGraph в папке «Source Files [Исходные файлы]» под программой S7. Затем исходный файл компилируется в блоки S7 для программы пользователя.
Синтаксис и формальные параметры проверяются на последнем элементе графа (при закрытии рабочего окна). Адреса и символы проверяются при компиляции исходного файла.
Язык программирования S7 CFCДополнительный пакет программного обеспечения CFC (Continuous Function Chart [Схема непрерывных функций]) – это язык программирования, используемый для графического связывания сложных функций.
Язык программирования S7 CFC используется для связывания существующих функций. Вам нет необходимости программировать самим многие стандартные функции, вместо этого Вы можете использовать библиотеки, содержащие стандартные блоки (например, для логических, математических функций, функций управления и обработки данных). Для использования CFC Вам не нужны детальные знания в области программирования или специальные знания о программном управлении, и Вы можете сосредоточиться на технологии, используемой в вашей отрасли промышленности.
Созданная программа хранится в виде схем CFC. Они находятся в папке «Charts [Схемы]» под программой S7. Эти схемы затем компилируются для формирования блоков S7 для программы пользователя. Возможно, Вы сами захотите создать подлежащие соединению блоки, в этом случае Вы программируете их для SIMATIC S7 с помощью одного из языков программирования S7, а для SIMATIC М7 – с помощью С/С++.
Мой блог находят по следующим фразам
Микропроцессорные комплексы в системах управления
для студентов всех форм обучения специальностей 050702 – Автоматизация и управление
СОСТАВИТЕЛЬ: А.А.Копесбаева Микропроцессорные комплексы в системах управления. Конспект лекций для студентов всех форм обучения специальностей 050702 – Автоматизация и управление - Алматы: АИЭС, 2009 - 47 с.
Настоящий конспект лекций включают в себя 15 конспектов лекций по дисциплине «Микропроцессорные комплексы в системах управления» в рамках основных дисциплин для специализации «Автоматизация и управление».
Конспект лекций предназначен для студентов всех форм обучения специальностей 050702 – Автоматизация и управление.
Лекция 1. Задачи и рольмикропроцессорныхконтроллеров в системе управленияисполнительными механизмами
Для современных локальных систем автоматического регулирования и управления основным элементом является микропроцессорный контроллер.
В традиционном представлении на систему управления воздействуют Хm -входные воздействия от исполнительных механизмов ИМ, различные возмущающие факторы fk не учтенные в системах управления, выходные величины объекта Yn измеряются датчиками. Задача микропроцессорной системы – принять сигнал от аналоговых ДА и дискретных ДД датчиков, а затем выработать выходной сигналы на исполнительные механизмы ИМ.
Рисунок 1- Локальная микропроцессорная система
Микропроцессорная система должна работать в реальном масштабе времени. Для синхронизации элементов системы все устройства снабжены таймерами. Во временном отношении сигналы с аналоговых датчиков обрабатывается дольше всего. Количество аналоговых каналов ограничено, и их выбор определяется коммутатором. Распределение выходных управляющих аналоговых сигналов выполняет коммутатор ЦАП. Быстродействие центрального процессора управления ЦПУ может быть обеспечено устройствами прерываний. Таким образом, задачи микропроцессоров:
? управление и регулирование;
? сбор и обработка технологических параметров;
? отображение и контроль данных;
? сигнализация и защита от аварийных ситуаций;
? диспетчеризация, архивирование и протоколирование.
Более сложные системы автоматизации решают те же задачи с большим количеством информации. Система локальной автоматизации является объектом управления для системы верхнего уровня. На современном рынке производства системами оперативного управления производственными процессами или MES системами называют системы, обеспечивающие эффективное исполнение в производственных операциях Оперативное управление обеспечивается и начинается с цехового (локального) уровня и заканчивается верхним уровнем ERPсистем. Для этого была создана международная ассоциация поставщиков решений для промышленных предприятий MESA (Manufacturing Enterprise Solution Association). MESA контролирует, регулирует и разрабатывает единые протоколы для решения следующих задач:
? распределение и контроль статуса ресурса
? диспетчеризация производственной задачи
? сбор данных и управление качеством
? управление технологическим обслуживанием
? составление производственного расписания
? управление трудовыми ресурсами
? координация технических процессов и отслеживание готовой продукции.
Стандарт, по которому работает MES, - система ISA95. Он устанавливается для программных функций, физических моделей, производственных мощностей, производственных и базисных процессов.
В соответствии с перечисленными задачами микропроцессорные контроллеры и системы можно разделить подобно тому, как разделяется АСУТП:
? системы сбора и обработки
? системы тестирования и контроля
Лекция 2. Классификация микропроцессоров
Существует множество критериев классификации микропроцессорных элементов. Приведем классификацию микропроцессорных элементов с точки зрения их использования в задачах автоматизации. История развития микропроцессоров такова, что их создание было связано с проблемами использования их в задачах автоматизации. Однако развитие микропроцессоров в направлении улучшения их характеристик в задачах управления объектами в реальном масштабе времени привело к возникновению мощных вычислительных систем – персональных компьютеров. Всемирное развитие микропроцессорной техники в задачах управления относится к 90-м годам 20 века. Это развитие связано с повсеместным применением на рынке контроллеров Гарвардской архитектуры. Свободно программируемые контроллеры (СПЛК) предназначены для автоматизации различных областей производства. Это направление получило развитие еще с 70-х годов 20 века. В настоящий момент это направление развитие является наиболее распространенным.
Т а б л и ц а 1 - Классификация микроконтроллеров
В рамках стандарта МЭК 61131-3 для программирования используется три разновидности языков программирования: язык списка операций STL, язык рел?ейно-контакторных схем LAD, язык функциональных блоков FBD.
Программирование контроллеров фирмы Siemens производится в среде создания и управления проектами Simatic Manager. На рисунке 5 приведена иерархия языков программирования этой среды. Язык программирования С7(М7) предназначен для программирования системных функций контроллеров и не используется потребителями контроллера, а значит, данный язык не открыт для широкого круга пользовател?ей. Все программное обеспечение Siemens базируется на языке S7 или STEP7. STEP7 - это язык программирования для любого пользователя. Программирование состоит в пошаговом описании ситуации технологического процесса. В язык STEP7 входят язык LAD – язык контактного плана, язык STL – язык список инструкций ассемблера, а также язык FBD - язык функциональных блок-диаграмм.
Рисунок 5 - Состав программного продукта контроллера Simatic.
Язык контактного плана LAD (рисунок 6) представляет собой последовательность из электрических сетей. Правый контакт сети (условно ??плюс??) уже имеется, пользователь набирает эту сеть и должен закончить катушкой или блоком. Автоматически появляется двойная шина электрической сети, условный минус.
Рисунок 6 - Язык контактного плана LAD
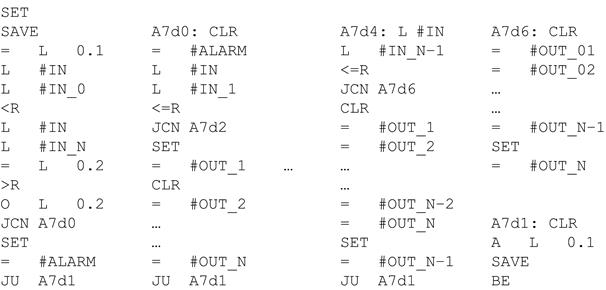
Язык STL (рисунок 7) также может состоять из последовательности сетей, а должна быть написан в одной сети. Логически каждая сеть представляет собой отдельную технологическую ситуацию, в связи с этим каждая сеть должна завершиться командой, изменяющей область памяти котроллера. Изменению могут подлежать внутренние области памяти контроллера, область памяти выходов и не бывают изменены программно области памяти входов. Это понятно, изменения в области памяти входов связаны с изменениями входной информации, то есть с изменением состояния реальных физических устройств на входах контроллера. Реальные физические устройства на выходах контроллера изменяют свое состояние с изменением от программных единиц контроллера.
Рисунок 7 - Язык список операций STL
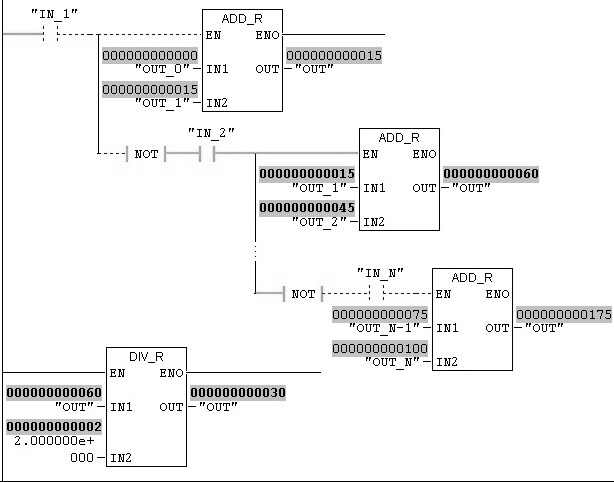
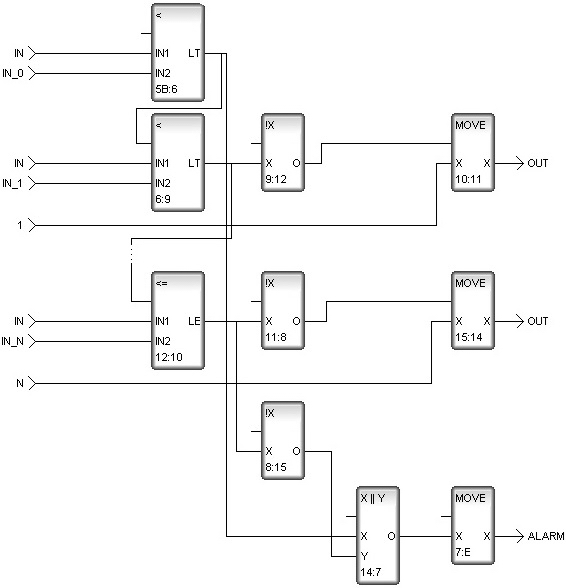
Язык программирования FBD (рисунок 8) предназначен для инженеров системотехников, привыкших конструировать ситуации технологического процесса в виде функциональных блоков.
Рисунок 8 - Язык программирования FBD
Язык программирования LAD предназначен для инженеров по автоматизации, привыкших проектировать технологические ситуации на рел?ейно-контакторных схемах. Наиболее экономичным с точки зрения занимаемого объёма памяти и наиболее быстродействующим является программа, написанная на языке STL. Также в настоящий момент на рынке труда больше программистов, чем инженеров наладчиков рел?ейно-контакторных схем. По этой причине наиболее актуальным является обучение на языке STL. Все операции рассмотрим на этом языке.

Рисунок 9 - Структура команд на языке STL
Метка - это не обязательный компонент операции, должна состоять не более чем из четырех символов, начинается с английской буквы или с символа “_”, а заканчивается двоеточием. Действие - ??? есть оператор языка, действию подлежит переменная, находящаяся по конкретному адресу: описание задания для CPU (такие задания, к примеру, как load [загрузить], scan [считать], compare [сравнить] и т.д.).Адрес - информация, необходимая для выполнения действия (к примеру, абсолютный адрес IW12, символьный адрес некоторой переменной ANALOGVALUE_1 или некоторой константы W#16#F001 и т. д.). Отдельные операторы не требуют задания адреса. Комментарий – не обязательный компонент, начинается с 2-х косых черт ”//”.
Лекция 5. Правила программирования и конструкции языков программирования СПЛК - понятие и виды. Классификация и особенности категории "Лекция 5. Правила программирования и конструкции языков программирования СПЛК" 2014, 2015.
Текстовой язык STL (анг. Statement List) является сборником инструкций, содержащих логические операции, соотношения, а также функции триггеров, Tаймеров, Счетчиков и др. которые предоставляют возможность соответствующей установки реле. Пользование текстовым языком для программирования реле NEED является очень эффективным и приближает выходную программу к внутренней структуре программы.
Структура программы STL
Программа в STL является последовательностью выполняемых инструкций. Каждя инструкция состоит из двух элементов:
1) Символа инструкции – идентификатора (кода), который в формате STL выполняет роль так назыв. ключевого слова.
2) Аргумента – т.е. переменной.
A, A(, AN, AN(, O,O(, ON, ON(, X, X(, XN, XN(,
I, Q, M, MDIR, H, A, T, C, HC1, H
1 - L - Cчетчик - является числом заданных считываний для Счетчика.
2 - L - Tаймер - является заданным временем для отмеривания Таймером .
Условной частью в данном примере будут являться инструкции, записанные в линиях 1, 2. При выполнении обоих условий, при высоком положении на входе I1 и выходе Kомпаратора A2, - выход Q4 будет установлен (положение ‘1’), a выход Q1 будет переустановлен (положение ‘0’). Инструкции ‘S Q4’ и ‘R Q1’ являются результативной частью.Инструкции: A, A(, AN, AN(, O, O(, ON, ON(, X, X(, XN, XN (являются условной частью цепи, а инструкции S, R, =,FP, SD, SF, SL, SE, CD, CU создают результативную часть цепи. Каждая отдельная цепь должна начинаться условной частью и заканчиваться результативной частью.
В установочном реле находится только одна программа, которую нельзя разделять на подпрограммы. Процессор в контроллере выполняет отдельные инструкции, начиная с первой и заканчивая на последней. После выполнения последней инструкции цикл программы повторяется. Преобразование программы контроллера указано на рис. ниже.
В таб. ниже указано список всех доступных инструкций STL.
Instruction List (IL) или Statement List (STL)
Программа записывается в виде текста. По структуре этот язык программирования наиболее похож на машинные коды, поэтому он позволяет наиболее полно реализовать все возможности контроллера. Недостатки: сложность визуального восприятия и сложность поиска ошибок.
Каждая строка программы содержит:

Рис. 5.16 Пример строки программы в STL (рисунок автора).
Для выполнения программы выделена дополнительная память для сохранения промежуточных результатов – рабочий регистр. Ячейки этого регистра называются стеками.
Программный блок начинается с первичной загрузки значения операнда в верхний (первый) стек рабочего регистра. В дальнейшем, при выполнение последующих строк программы значение верхнего стека переписывается. Второй стек (или последующие стеки) включаются в работу при условии новой первичной загрузки (команда LD).
Таблица 5.3 Пример обработки программы в STL (таблица автора).
STL для S7-300 и S7-400. ПрограммированиеНазвание: STL для S7-300 и S7-400. Программирование
Автор: Siemens AG
Издательство: Siemens AG
Это руководство поможет Вам при разработке пользовательских программ на языке программирования Список операторов — STL (от англ. Statement List).
WinPLC7 7WinPLC7 — Среда разработки, аналогичная STEP7 фирмы Siemens
Программный пакет WinPLC7 предназначен для конфигурирования, программирования, отладки программ и диагностики контроллеров VIPA всех серий. Пакет имеет дружественный интерфейс для всех этапов работы.
Для программирования систем автоматизации в рамках пакета WinPLC7 могут быть использованы три языка: Statement List (STL) — список инструкций, Ladder Diagram (LAD) — язык релейно-контактных схем, Function Block Diagram (FBD) — язык функциональных блоков.
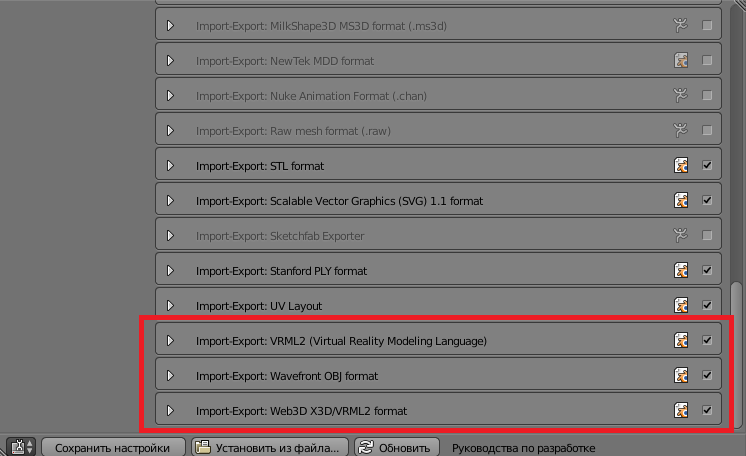
WinPLC7 позволяет импортировать/экспортировать проекты для контроллеров фирмы Siemеns, сохранять резервную копию программы и данных на MMC-карту, а также осуществлять программную симуляцию работы контроллера. Для контроллеров System 100V лицензия на пакет WinPLC7 бесплатная.
Программная платформа PAS4000 состоит из нескольких редакторов для программирования и конфигурирования ПЛК, а также программных блоков.
В системе PAS4000 средства для конфигурирования, программирования, запуска в эксплуатацию и эксплуатации полностью совместимы. Интерфейсы данных стандартизированы, что облегчает обмен информацией на всех этапах автоматизации.
Простое программирование и конфигурирование ПЛКГрафический редактор программ PASmulti предназначен для инженеров-конструкторов. Он имеет большую библиотеку сертифицированных программных блоков для определения положения и реализации общих функций (например, аварийного останова). Блоки для стандартных задач и задач безопасности значительно упрощают разработку программ автоматизации.
В PAS4000 для программирования ПЛК используются редакторы PAS STL (язык структурированного текста), PAS LD (язык релейных схем) и PAS IL (язык списка инструкций), соответствующие стандарту EN/IEC 61131-3. Эти редакторы классифицированы организацией TUV Sud как LVL (языки ограниченной вариативности). Такая классификация, прежде всего, означает, что редакторы для программирования ПЛК соответствуют требованиям к разработке пользовательского программного обеспечения, связанного с безопасностью.

Идентичная среда программирования PASmulti и PAS IL/PAS STL/PAS LD упрощает работу. Программные блоки, написанные пользователем в PAS STL, например, могут без труда переноситься в PASmulti. В результате создается возможность четко и легко структурировать сложные проекты, содержащие программные компоненты из различных редакторов. В законченной прикладной задаче программа имеет централизованный вид.
Доступны следующие программные функции:
Используйте удобную программную платформу PAS4000 для быстрого программирования и конфигурирования системы управления PSSuniversal PLC/PSSuniversal multi для системы автоматизации PSS 4000.
Загрузите обновленные версии программного обеспечения для системы автоматизации PSS 4000:


Создавайте программы просто, быстро и интуитивно: При помощи редактора программ PASmulti в системе автоматизации PSS 4000 это можно сделать проще, чем когда-либо.
Для разводки проводных соединений используйте мышку: входы и выходы можно свободно конфигурировать и связывать, используя логические элементы, путем перетаскивания. Простые символы и обозначения облегчают задачу.
Две среды, стандартизованные операции: Программирование в среде IEC и конфигурирование с помощью редактора PASmulti происходит в одной и той же среде программирования, очень простой в использовании. Например, блоки, самостоятельно написанные в редакторе PAS IL Editor в соответствии со стандартом EN/IEC 61131-3, можно легко загрузить в редактор PASmulti и скомпоновать со стандартными блоками. для задач обеспечения безопасности и обычных задач.
Упрощение путем разбиения на модули: модульная система позволяет сгруппировать станки и оборудование в небольшие мехатронные модули, что значительно повышает пригодность к повторному использованию и стандартизацию – даже в программных средствах.
Системы управления PSSuniversal PLC можно программировать/конфигурировать с помощью графического редактора PASmulti.
Редактор PAS STL, PAS LD и PAS IL – в соответствии с EN/IEC 61131-3
Системы управления PSSuniversal PLC могут программироваться как программируемые логические контроллеры для выполнения стандартных задач и задач безопасности на языках программирования EN/IEC 61131-3. PAS STL (Структурированный текст), PAS LD (Лестничная диаграмма) и PAS IL (Перечень инструкций) имеются в наличии уже сейчас, а появление редакторов EN/IEC 61131-3 еще ожидается.
Блоки – Возможность многократного использования и стандартизация
Имеется обширная библиотека готовых отказоустойчивых стандартных блоков, обеспечивающая высокую степень повторного использования. Кроме того, пользователи могут создавать и многократно использовать собственные блоки.
Блоки можно комбинировать и таким образом создавать более сложные функции. Слияние блоков в один упрощает работу с ним.
Это экономит время и расходы на этапах проектирования, реализации, установки и технического обслуживания.

Данный инструмент включает в себя широчайший спектр блоков ПО для выполнения функций безопасности:

Традиционные модели обычно подразумевают лицензирование фиксированного набора функций, т.е. вы заранее оплачиваете все функции независимо от того, пользуетесь вы ими или нет. С нами все по-другому - вы оплачиваете только те функции, которыми фактически пользуетесь. Как? Все довольно просто:
Решайте сами, сколько вы потратите на программное обеспечение.
Вы всегда можете выбрать полный набор функций. В поддержку сказанного любой может скачать программную платформу PAS4000 бесплатно! Решать вам, пользоваться предлагаемыми платными функциями или запрограммировать необходимые функции самостоятельно.
Вы должны купить лицензию. Но вам придется заплатить только за те функции, которыми вы фактически пользуетесь в проекте. Различные функции оцениваются в единицах под названием PASunits.
PASunits распространяются на различные программные редакторы, предустановленные Pilz функциональные блоки, а также специальные сетевые функции. После того, как проект будет протестирован пользователем и переведен в режим производства, он лицензируется в PAS4000. В ходе этого процесса PASunits рассчитываются для используемых в проекте функций и затем вносятся в этот проект с единичного счета ПО. PASunits можно приобрести у Pilz для пополнения единичного счета.








